![Pololu]() During our trip out to Vegas for Defcon, we were lucky enough to catch up with a few of the companies that should be of interest to Hackaday readers. One of the companies based out of the area is Pololu, makers and purveyors of fine electronics and robots. In an incredible bit of lucky scheduling, LV Bots, the Las Vegas area robot builders club, was having an event the same weekend we were there. A maze challenge, no less, where builders would compete to build the best robot and write the best code to get a pile of motors and electronics through a line-following maze in the fastest amount of time.
During our trip out to Vegas for Defcon, we were lucky enough to catch up with a few of the companies that should be of interest to Hackaday readers. One of the companies based out of the area is Pololu, makers and purveyors of fine electronics and robots. In an incredible bit of lucky scheduling, LV Bots, the Las Vegas area robot builders club, was having an event the same weekend we were there. A maze challenge, no less, where builders would compete to build the best robot and write the best code to get a pile of motors and electronics through a line-following maze in the fastest amount of time.
The Bots
The LV Bots events are held in the same building as Pololu, and unsurprisingly there were quite a few Pololu employees making a go at taking the stuff they developed and getting it to run through a maze. At least one bot was based on the Zumo kit, and a few based on the 3pi platform. Interestingly, the Raspberry Pi Model B+ was the brains of quite a few robots; not extremely surprising, but evidence that the LV Bots people take their line-following mazes seriously and are constantly improving their builds.
Each robot and builder ‘team’ was given three runs. For each team, the first run is basically dedicated to mapping the entire maze. A carefully programmed algorithm tries to send the robot around the entire maze, storing all the intersections in memory. For the second and third runs, the bot should – ideally – make it to the end in a very short amount of time. This is the ideal situation and was only representative of one team for that weekend’s event.
The worst case scenario is a bot that doesn’t quite have the proper mapping algorithm down. For example:
If, however, a robot can figure out all the nodes in the line following map, the second and third runs can go by pretty quick:
The folks at LV Bots put together a recap of the entire competition as well:
Pololu
Although I did arrive a bit after normal working hours, [Ryan] and [Kevin] were kind enough to take me around their shop for a small tour of the joint. It’s more or less what you would expect: one giant room with pick and place machines, giant ovens, solder paste dispensers, enough equipment for all the testing and rework, and a giant wall of filled with all their products. One of the more interesting pieces of equipment was a soldering robot. Yes, as in a robot with a soldering iron. Here are the pics:
![Solderbot3]()
![Solderbot2]()
![Solderbot1]()
Being after hours, the machines were not running. [Kevin] did send me a video of the manufacturing process of their A-Star 32U4 Micro, shown below:
In addition to their huge manufacturing room, the guys took me up to their dev lab where they come up with the design of all their products. Lego abound, surprisingly in already built configuration. I’ll let the picture galleries speak for themselves, shown below.
The Bots
![PacBot]()
![DSC_0030]()
![LV Bots]()
![DSC_0007]()
![DSC_0023]()
![Blinky]()
![DSC_0004]()
![The maze]()
![Blinky again]()
![RaspiBotsB]()
![DSC_0005]()
![DSC_0003]()
![Setting up for a run]()
![DSC_0009]()
![DSC_0008]()
Pololu
![The 'wall of samples']()
!["The" Pololu]()
![Thousands of dollars in pogo pins]()
![DSC_0055]()
![DSC_0053]()
![DSC_0054]()
![Shop floor]()
![Hundreds of steppers]()
![DSC_0041]()
![DSC_0056]()
![Truly, important stuff happens in the design lab]()
Filed under:
hardware,
Interviews ![]()
![]()


























 During our trip out to Vegas for Defcon, we were lucky enough to catch up with a few of the companies that should be of interest to Hackaday readers. One of the companies based out of the area is
During our trip out to Vegas for Defcon, we were lucky enough to catch up with a few of the companies that should be of interest to Hackaday readers. One of the companies based out of the area is 































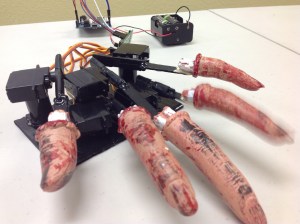 Impatient Severed Fingers – [Amanda] came up with a cute use for some mini servos and a zombie hand prop. The five severed fingers were attached to one end of a plastic rod. The other end was mounted to each of five servos which were laid out in the appropriate hand shape and attached to a fixed base. An Arduino running a basic sweep sketch animated the motors at slightly staggered intervals, creating a nice rolling effect. Even with the moving parts exposed this prop would be awesome to have on display, or set the ambiance with its continuous tapping…
Impatient Severed Fingers – [Amanda] came up with a cute use for some mini servos and a zombie hand prop. The five severed fingers were attached to one end of a plastic rod. The other end was mounted to each of five servos which were laid out in the appropriate hand shape and attached to a fixed base. An Arduino running a basic sweep sketch animated the motors at slightly staggered intervals, creating a nice rolling effect. Even with the moving parts exposed this prop would be awesome to have on display, or set the ambiance with its continuous tapping…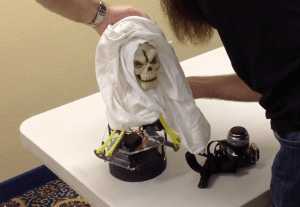 Angry Spectral Delta – [Nathan Bryant] made an actual costume for his delta robot from Robot Army. By attaching a small plastic skull to the end effector and draping a tattered piece of fabric over the rest of the mechanism he effectively transformed the delta into a little ghost with a sassy personality. The head swiftly bobbed about, all while staying parallel to the table… until it intermittently came unhinged and hung limply, which was a nice added effect!
Angry Spectral Delta – [Nathan Bryant] made an actual costume for his delta robot from Robot Army. By attaching a small plastic skull to the end effector and draping a tattered piece of fabric over the rest of the mechanism he effectively transformed the delta into a little ghost with a sassy personality. The head swiftly bobbed about, all while staying parallel to the table… until it intermittently came unhinged and hung limply, which was a nice added effect! Robotic Exorcism Baby – This doll could turn its half skeleton, half baby face 180 degrees and then laugh at your fear. By attaching two servo motors together, [Jeremy] was able to create a pan and tilt mechanism which acted as the baby’s contorting neck and chattering jaw. The micro controller sending commands to the motors was hidden modestly under her dress.
Robotic Exorcism Baby – This doll could turn its half skeleton, half baby face 180 degrees and then laugh at your fear. By attaching two servo motors together, [Jeremy] was able to create a pan and tilt mechanism which acted as the baby’s contorting neck and chattering jaw. The micro controller sending commands to the motors was hidden modestly under her dress.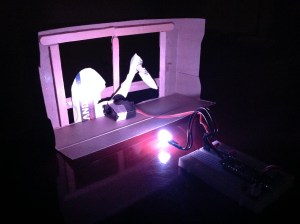 Stabby Animated Cardboard Shadowbox - Among the animatronic devices seen at the event was a shadowbox made by [Brandon] hidden in a dark conference room nearby. When one happened to walk past the seemingly unoccupied space, they’d glimpse the silhouette of an arm stabbing downward with a knife through a windowsill. Being lured in for further investigation you’d find that the shadow was being cast by some colored LEDs through a charmingly simple device. A cutout made from recycled card stock was attached to a single servo. This whole mechanism itself rocked back and forth slightly as the motor moved, which wasn’t intentional but added some realism to the motion of the stabby arm.
Stabby Animated Cardboard Shadowbox - Among the animatronic devices seen at the event was a shadowbox made by [Brandon] hidden in a dark conference room nearby. When one happened to walk past the seemingly unoccupied space, they’d glimpse the silhouette of an arm stabbing downward with a knife through a windowsill. Being lured in for further investigation you’d find that the shadow was being cast by some colored LEDs through a charmingly simple device. A cutout made from recycled card stock was attached to a single servo. This whole mechanism itself rocked back and forth slightly as the motor moved, which wasn’t intentional but added some realism to the motion of the stabby arm.

![[Claire] demonstrating robotic closet demo and app](http://hackadaycom.files.wordpress.com/2015/01/dsc_0378.jpg?w=150&h=100)



![[Nathan Bryant] and robot](http://hackadaycom.files.wordpress.com/2015/01/dsc_03961.jpg?w=150&h=100)

![[Joe Carson] and robot](http://hackadaycom.files.wordpress.com/2015/01/dsc_0390.jpg?w=150&h=100)















